







د کیڼ لاس قاعده، د ښي لاس قاعده، د ښي لاس قاعده.د کیڼ لاس قاعده، دا د موټرو گردش ځواک تحلیل لپاره اساس دی.په ساده ډول ووایاست، دا په مقناطیسي ساحه کې د اوسني لیږدونکي کنډکټر دی، کوم چې د ځواک لخوا اغیزمن کیږي.
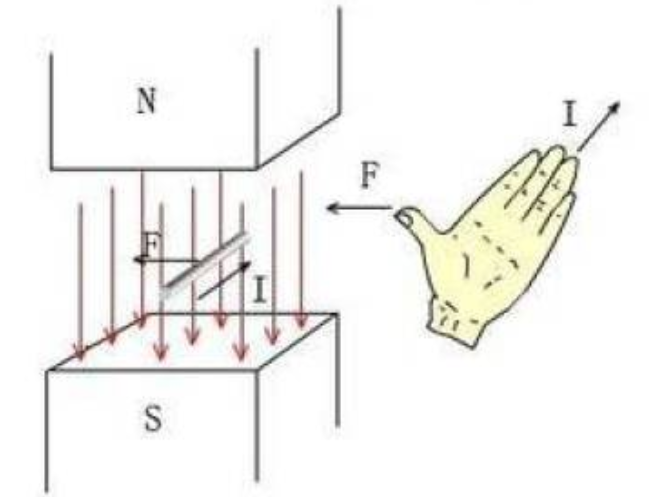
پریږدئ چې د مقناطیسي ساحې کرښه د لاس د مخ څخه تیریږي، د ګوتو سمت د اوسني لوري لوري دی، او د ګوتو سمت د مقناطیسي ځواک لوري دی.د ځواک کرشن د مقناطیسي ساحې کرښې قطع کوي ترڅو د بریښنایی ځواک تولید کړي.
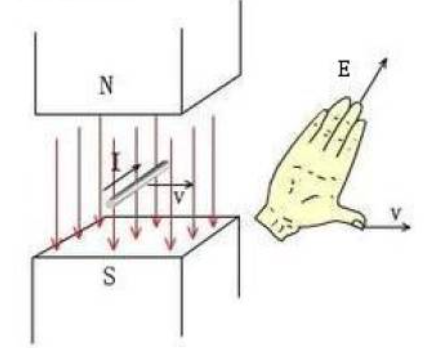
پریږدئ چې د مقناطیسي ساحې کرښه د لاس څخه تیریږي، د ګوتو سمت د حرکت لوري دی، او د ګوتې سمت د تولید شوي الکتروموتیک ځواک لوري دی.ولې د هڅول شوي بریښنایی ځواک په اړه وغږیږئ؟زه نه پوهیږم که تاسو ورته تجربه لرئ.کله چې تاسو د موټرو درې مرحلې تارونه سره یوځای کړئ او موټور د لاس په واسطه وګرځوئ، تاسو به ومومئ چې مقاومت خورا لوی دی.دا ځکه چې انډکشن د موټرو د گردش په جریان کې واقع کیږي.د الکتروموتیک ځواک جریان تولیدوي، او په مقناطیسي ساحه کې د کنډکټر له لارې جریان به د حرکت د لوري په مقابل کې یو ځواک تولید کړي، او هرڅوک به احساس وکړي چې د گردش په وړاندې ډیر مقاومت لري.
د درې مرحلې تارونه جلا شوي او موټور په اسانۍ سره بدلیدلی شي
د درې پړاو لینونه یوځای شوي، او د موټرو مقاومت خورا لوی دی.د ښي لاس د سکرو د قاعدې له مخې، انرژی شوی سولینایډ په ښي لاس کې ونیسئ، تر څو څلور ګوتې د اوسني په څیر په ورته لوري کې راښکته شي، بیا د ګوتو لخوا اشاره شوې پای د انرژی سولینایډ N قطب دی.
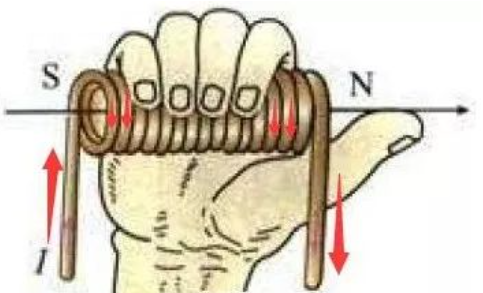
دا قاعده د انرژی شوي کویل د قطبي قضاوت لپاره اساس دی، او د سره تیر سمت اوسنی سمت دی.د دریو قواعدو د لوستلو وروسته، راځئ چې د موټرو د گردش اساسي اصولو ته یو نظر وکړو.لومړۍ برخه: د DC موټور ماډل موږ د DC موټور ماډل پیدا کوو چې د عالي ښوونځي فزیک کې مطالعه شوي ، او د مقناطیسي سرکټ تحلیل میتود له لارې ساده تحلیل ترسره کوو.
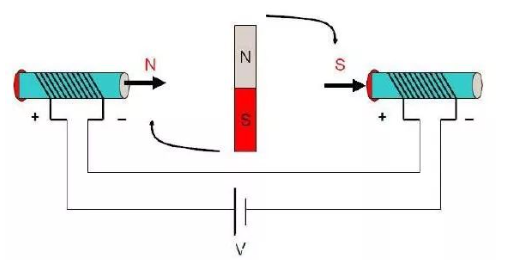
حالت 1 کله چې کرنټ په دواړو سرونو کې په کویلونو باندې پلي کیږي ، د ښي لاس سکرو قاعدې سره سم ، د پلي شوي مقناطیسي انډکشن شدت B (لکه څنګه چې د موټ تیر لخوا ښودل شوی) به رامینځته شي ، او په مینځ کې روټر به هڅه وکړي چې رامینځته کړي. د دې داخلي مقناطیسي انډکشن لاین سمت څومره چې امکان لري.د بهرنۍ مقناطیسي ساحې لاین سمت د یو لنډ تړل شوي مقناطیسي ساحې لاین لوپ جوړولو لپاره مطابقت لري، ترڅو داخلي روټر د ساعت په لور وګرځي.کله چې د روټر مقناطیسي ساحې سمت د بهرني مقناطیسي ساحې سمت ته عمودي وي ، د روټر گردشي تورک ترټولو لوی دی.په یاد ولرئ چې "لمه" تر ټولو لوی بلل کیږي، نه "قوت".دا سمه ده چې کله د روټر مقناطیسي ساحه د بهرني مقناطیسي ساحې په څیر وي، په روټر کې مقناطیسي ځواک ترټولو لوی وي، مګر پدې وخت کې روټر په افقی حالت کې وي او د ځواک بازو 0 وي، او البته دا به نه ګرځي.د اضافه کولو لپاره، شیبه د ځواک او ځواک بازو محصول دی.که یو له دوی څخه صفر وي، محصول صفر دی.کله چې روټر افقي حالت ته وګرځي، که څه هم دا نور د څرخيدونکي تورک لخوا نه اغیزمن کیږي، دا به د جړتیا له امله د ساعت په لور حرکت ته دوام ورکړي.په دې وخت کې، که د دوو solenoids اوسنی سمت بدل شي، لکه څنګه چې په لاندې شکل کې ښودل شوي، روټر به حرکت ته دوام ورکړي.د ساعت په لور مخ واړوه
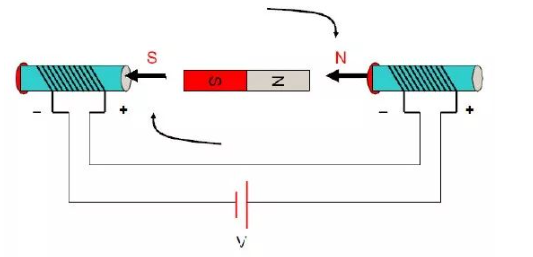
په 2 حالت کې، د دوو solenoids اوسنی سمت په دوامداره توګه بدلیږي، او داخلي روټر به حرکت ته دوام ورکړي.د جریان د سمت بدلولو دې عمل ته کموټیشن ویل کیږي.یو اړخ یادښت: کله چې حرکت کول یوازې د روټر موقعیت پورې اړه لري او په مستقیم ډول د کوم بل مقدار سره تړاو نلري.برخه 2: د درې مرحلې دوه قطب داخلي روټر موټور په عمومي ډول ووایو، د سټیټر درې مرحلې بادونه د ستوري پیوستون حالت او د ډیلټا پیوستون حالت لري، او "د درې مرحلې ستوري اتصال دوه دوه کنډکشن حالت" خورا عام دی. کارول کیږي، کوم چې دلته کارول کیږي.دا ماډل د ساده تحلیل لپاره کارول کیږي.
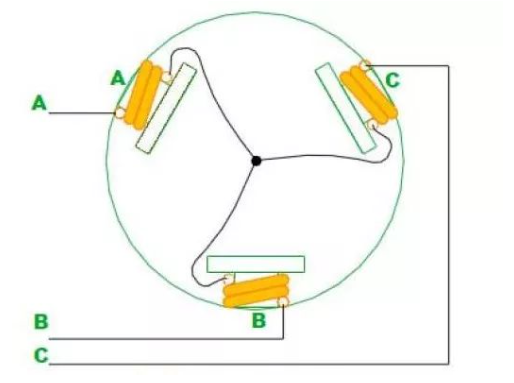
پورتنۍ ارقام ښیې چې د سټیټر وینډونه څنګه وصل شوي (روټر د فرضي دوه قطب مقناطیس په توګه ندي ښودل شوي) او درې وانډونه د مرکزي ارتباط نقطې له لارې په یو "Y" شکل کې سره وصل شوي.ټول موټور درې تارونه A, B, C ته ځي. کله چې دوی دوه په دوه سره انرژی شي، د AB، AC، BC، BA، CA، CB په نوم 6 قضیې شتون لري.په یاد ولرئ چې دا په ترتیب کې دی.
اوس زه لومړی مرحلې ته ګورم: د AB مرحله فعاله ده
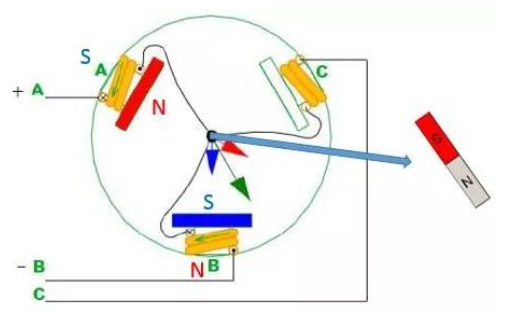
کله چې د AB مرحله فعاله شي، د مقناطيسي ساحې کرښه چې د A قطب کویل لخوا رامینځته کیږي د سور تیر لخوا ښودل کیږي، او د B قطب لخوا رامینځته شوي مقناطیسي ساحې کرښې سمت د نیلي تیر لخوا ښودل کیږي، بیا سمت د نتیجې قطب د شنه تیر په واسطه ښودل کیږي، نو فرض کړئ چې دوه قطبي مقناطیس شتون لري، د N-قطب سمت به د شنه تیر لخوا ښودل شوي سمت سره سمون ولري "په منځ کې روټر به هڅه وکړي چې د ساتلو لپاره هڅه وکړي. د دې داخلي مقناطیسي ساحې لینونو سمت د بهرني مقناطیسي ساحې لینونو سمت سره مطابقت لري.د C لپاره، هغه د اوس لپاره د هغه سره هیڅ تړاو نلري.
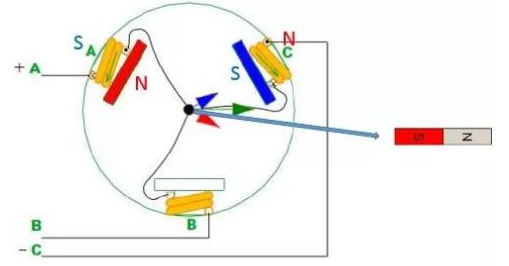
مرحله 2: د AC مرحله انرژی شوی
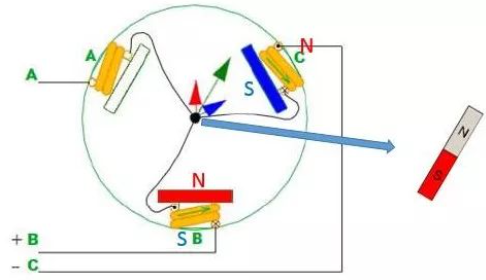
دریمه مرحله: د BC مرحله بریښنایی کول
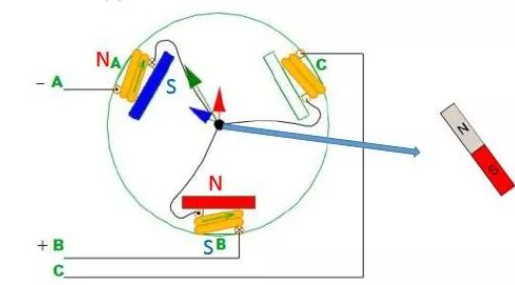
دریمه مرحله: د BA مرحله فعاله ده
لاندې د منځني مقناطیس (روټر) دولتي ډیاګرام دی: هر پروسس روټر 60 درجې څرخي

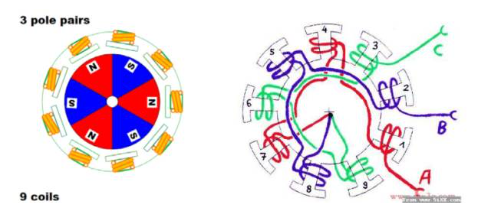
بشپړ گردش په شپږو پروسو کې بشپړ شوی، چې شپږ یې بدلیږي.دریمه برخه: د درې مرحلې ملټي ونډینګ ملټي قطب داخلي روټر موټور راځئ چې یو ډیر پیچلي ټکي ته وګورو.شکل (a) د درې مرحلې نهه بادي شپږ قطب (درې مرحلې، نهه بادي، شپږ قطبي) موټور دی.د قطب په مقابل کې) داخلي روټر موټور، د باد نښلول په شکل (b) کې ښودل شوي.د شکل (b) څخه لیدل کیدی شي چې درې پړاوه بادونه هم په منځني نقطه کې یو بل سره تړلي دي، کوم چې د ستوري ارتباط هم دی.په عموم کې ، د موټرو د بادونو شمیر د دایمي مقناطیسي قطبونو له شمیر سره متناسب دی (د مثال په توګه ، د 6 بادونو او 6 قطبونو پرځای 9 بادونه او 6 قطبونه کارول کیږي) ، نو د سټیټر او د غاښونو مخنیوي لپاره. د روټر مقناطیس د جذب او تنظیم کولو څخه.
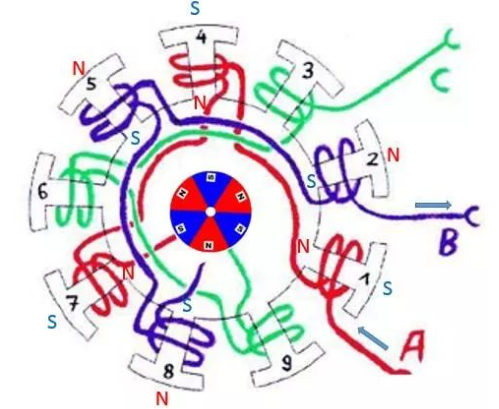
د دې حرکت اصول دا دي: د روټر N قطب او د انرژی شوي باد S قطب د سمون کولو تمایل لري، او د روټر S قطب او د انرژی شوي باد د N قطب د سمون کولو تمایل لري.يعنې، S او N يو بل ته جذبوي.په یاد ولرئ چې دا د تیر تحلیل میتود څخه توپیر لري.ښه، راځئ چې تاسو سره مرسته وکړو چې دا بیا تحلیل کړو.لومړۍ مرحله: AB مرحله بریښنایی ده
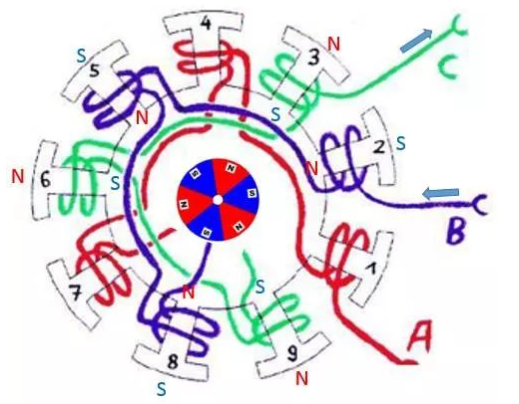
مرحله 2: د AC مرحله انرژی شوی

دریمه مرحله: د BC مرحله بریښنایی کول
د پوسټ وخت: اکتوبر 21-2022